

Φθίνουσα
ταλάντωση
Γ΄ λυκείου
Στις φθίνουσες ταλαντώσεις με δύναμη απόσβεσης της
μορφής F= –bv, η συνάρτηση y=f(t) είναι της μορφής:
y=y0+A0 ∙ e^(-Λt) ∙ συν(ωt) ΑΝ=A0 ∙ e^(-ΛNT)
ευκαιρία να επισημάνουμε τις φραγμένες συναρτήσεις
με άνω και κάτω φράγμα, εν προκειμένω τις συναρτήσεις:
y = y0 + A0 ∙ e^(-Λt) και y = y0 – A0 ∙ e^(-Λt)
Καταγράφουμε μια φθίνουσα ταλάντωση, μελετάμε και αναλύουμε
τη γραφική παράσταση ώστε να βρούμε τη συνάρτηση και στη συνέχεια την
επαληθεύουμε με το λογισμικό GeoGebra.
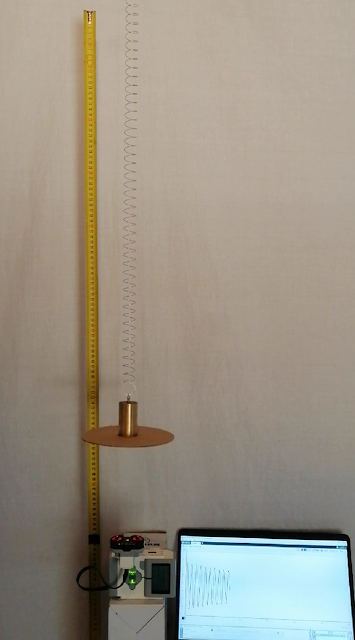
§ Για
ταλαντωτή χρησιμοποιούμε ένα ελατήριο με μια μάζα κι ένα κυκλικό χαρτόνι
διαμέτρου περίπου 20 cm.
§ Ως
καταγραφικό χρησιμοποιούμε
I.
το MultiLog
του
εργαστηρίου
II.
ή το Arduino
III.
ή το ev3 της Lego
IV.
ή το λογισμικό Tracker.
I.
Σύντομη περιγραφή της δραστηριότητας με MultiLog:
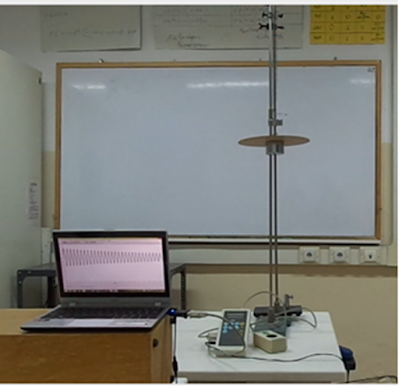
Στην εικόνα, φαίνεται ο
ταλαντωτής (ελατήριο από το νόμο του Χουκ, μάζα 1 kg και δίσκος από χαρτόνι για αύξηση της απόσβεσης) και η συσκευή DbLab με τον αισθητήρα απόστασης, συνδεδεμένη με υπολογιστή. Η συσκευή DbLab έχει ρυθμιστεί να πάρει 2000 μετρήσεις με ρυθμό 25 μετρήσεις το
δευτερόλεπτο (80 s).
Στη συνέχεια εκτυπώνουμε
τη γραφική παράσταση, τη φωτοτυπούμε και τη μοιράζουμε στους μαθητές, να τη
μελετήσουν και να βρουν τη συνάρτηση που την εκφράζει

Για να ελέγξουμε το
αποτέλεσμα, γράφουμε τη συνάρτηση στο GeoGebra και συγκρίνουμε τη
γραφική παράσταση με την πειραματική.

II. Σύντομη περιγραφή της δραστηριότητας με Arduino:

§ Προσαρμόζουμε
τη συσκευή υπερήχων (Ultrasonic)
απευθείας στις πύλες 11, 12, 13 και ground
και
συνδέουμε το Arduino με τον
υπολογιστή.
§ Ανοίγουμε το περιβάλλον προγραμματισμού Arduino IDE, αντιγράφουμε (copy) το παρακάτω πρόγραμμα και το επικολλούμε (paste) στο περιβάλλον.
§ Στη συνέχεια κλικ στο βελάκι της
δεύτερης γραμμής ώστε να μεταγλωττίσει το πρόγραμμα σε κώδικα μηχανής και να το
φορτώσει.
§ Θα μας ζητήσει να σώσουμε το πρόγραμμα με μια
ονομασία, πράγμα που κάνουμε, ας πούμε την UltraSonicExperiment.
§ Μόλις ολοκληρωθεί η φόρτωση, θέτουμε σε ταλάντωση τον ταλαντωτή, κλικ στο Εργαλεία – Σχεδιογράφος σειριακής
§ Ανοίγει
στην οθόνη ο Σχεδιογράφος σειριακής και αρχίζει η σχεδίαση της γραφικής
παράστασης της φθίνουσας ταλάντωσης επί 40 δευτερόλεπτα.
§ Με print screen μεταφέρουμε τη γραφική
παράσταση σε Word αρχείο,
το τυπώνουμε και μοιράζουμε φωτοτυπίες του στους μαθητές που με εργασία στο
σπίτι:

§ Προσδιορίζουν
το y0
(μετατόπιση του άξονα των χρόνων)
§ Το Α0
και το Α24 ή όποιο άλλο πιο απομακρυσμένο Α__
§ Μετράνε 24Τ
(λαμβάνοντας υπόψη ότι το 0 – 500 μετρήσεις του οριζόντιου άξονα του
σχεδιογράφου αντιστοιχούν σε 0 – 0,080 x 500 =40 δευτερόλεπτα) και υπολογίζουν την
περίοδο Τ και τη γωνιακή συχνότητα ω
§ Υπολογίζουν το Λ από τη σχέση Α24= Α0∙e^(-Λ24Τ)
§ Και
παρουσιάζουν τη συνάρτηση y=y0+Α0∙e^(-Λt)∙συν(ωt)
Για επαλήθευση, γράφουμε τη
συνάρτηση στο λογισμικό GeoGebra, οπότε
με προσαρμογή των αξόνων προκύπτει η ίδια γραφική παράσταση. Αν όχι, ψάχνουμε
το λάθος.
Στο παράδειγμα υπολογίστηκε η συνάρτηση:
με γραφική αναπαράσταση στο GeoGebra την:

Για να επαναλάβουμε το πείραμα, απενεργοποιούμε τη σειριακή οθόνη, ξαναθέτουμε σε ταλάντωση τον ταλαντωτή, πατάμε την επανεκκίνηση του Arduino (Reset, κόκκινο πιεστικό διακόπτη πάνω δεξιά) και ενεργοποιούμε τη σειριακή οθόνη.

Το
πρόγραμμα της φθίνουσας ταλάντωσης
const
int vccPin = 11;
const int trigPin = 12;
const int echoPin = 13;
long duration;
long distance;
int n=0;
void setup() {
Serial.begin(9600);
pinMode(vccPin, OUTPUT);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
digitalWrite(vccPin, 1);
}
void loop() {
for(int
i=0;i<=10;i++){dist();delay (100);}
for(int i=0;i<500;i=i+1){
dist();
Serial.println(distance);
delay(80); //500 μετρήσεις x 80 ms = 40000 ms = 40 s
}
do{n=n+1;delay(2000);}while(n<3000);//για
να σταματήσει η καταγραφή
}
void dist() {
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin,
HIGH);
distance = 0.018 * duration;
}
· Προσαρμόζουμε
τη συσκευή υπερήχων (Ultrasonic) στο τουβλάκι
(brick) ev3
· Το συνδέουμε
με καλώδιο στη θύρα 4
·
Ενεργοποιούμε το πρόγραμμα: Lobby – File – New Project – Experiment
· Ορίζουμε
τις παραμέτρους: 60 seconds και 12 Samples per Second
· Ενεργοποιούμε
τη σύνδεση Bluetooth
με
τον υπολογιστή
· Θέτουμε
σε ταλάντωση τον ταλαντωτή (ελατήριο – μάζα – χαρτόνι διαμέτρου 20 cm για να αυξήσουμε τις
τριβές)
· Κλικ στο
μεσαίο βελάκι (Download
and Run) στον πίνακα κάτω δεξιά
· Αρχίζει
αμέσως η καταγραφή της φθίνουσας ταλάντωσης και σταματά μετά από 40 δευτερόλεπτα
· Με print screen μεταφέρουμε τη γραφική
παράσταση σε Word αρχείο,
το τυπώνουμε και μοιράζουμε φωτοτυπίες του στους μαθητές που με εργασία στο
σπίτι.

§ Προσδιορίζουν
το y0
(μετατόπιση του άξονα των χρόνων)
§ Το Α0
και το Α34 ή όποιο άλλο πιο απομακρυσμένο Α__
§ Το 34Τ
και υπολογίζουν την περίοδο και τη γωνιακή συχνότητα ω
§ Υπολογίζουν το Λ από τη σχέση Α34= Α0∙e^(-Λ34T)
§ Και
παρουσιάζουν τη συνάρτηση y=y0+Α0∙e^(-Λt)∙συν(ωt)
Για επαλήθευση, γράφουμε τη
συνάρτηση στο λογισμικό GeoGebra, οπότε
με προσαρμογή των αξόνων προκύπτει η ίδια γραφική παράσταση. Αν όχι, ψάχνουμε
το λάθος.
Στο παράδειγμα υπολογίστηκε η
συνάρτηση:
με γραφική αναπαράσταση στο GeoGebra την:

Το Tracker
είναι
ένα άριστο λογισμικό, κυρίως για την κίνηση σωμάτων. Είναι ένα ελεύθερο
λογισμικό στο διαδίκτυο και απλό στη χρήση του, με απλές οδηγίες που θα βρείτε
στο διαδίκτυο π.χ. του Βασίλη Νούση, από το ΕΚΦΕ Θεσπρωτίας:
https://drive.google.com/file/d/13BPNWFiueA89XIPVpQZRpqVD567nSa4N/view
To λογισμικό Tracker απαιτεί:
· τη βιντεοσκόπηση του πειράματος
· τη φόρτωση του βίντεο στο λογισμικό
· τη χρονική ιχνηλάτηση του κινούμενου σώματος
Τα προς ιχνηλάτηση σημεία (περίπου 1000) είναι πολλά και γι’ αυτό επιλέγουμε το ταλαντούμενο σώμα να είναι ευδιάκριτο ως προς το περιβάλλον του ώστε να ενεργοποιήσουμε την αυτόματη ιχνηλάτηση.
Έκπληξη προκάλεσε στους μαθητές και όχι μόνο, όταν κατά τη βιντεοσκόπηση της ταλάντωσης, στο οπτικό πεδίο, υπήρχε και η οθόνη του υπολογιστή που κατέγραφε την ίδια ταλάντωση με μια από τις προηγούμενες μεθόδους.
Πολλά τα πλεονεκτήματα της μεθόδου μιας και το βίντεο το μοιράζουμε στους μαθητές που το αναλύουν και μπορούν να το ανακαλέσουν οποιαδήποτε στιγμή, ακόμη και σε επανάληψη μετά από μήνες.


