
Η εργασία παρουσιάστηκε στο Πανελλήνιο Συνέδριο
της Ένωσης Ελλήνων Φυσικών 2016 στην Αίγινα
ROBOT ΚΑΙ TRACKER
στη διδασκαλία των γραφημάτων και πινάκων των
κινήσεων στο λύκειο.
Κωνσταντίνος Μαΐστρος, καθηγητής
Δ.Ε., ΠΕ04.01, cmaistros@yahoo.gr
Σύλβια Κατσαμένη, καθηγήτρια Δ.Ε., ΠΕ03, sylfekat@yahoo.gr
15ο Γενικό Λύκειο Αθηνών
ΘΕΜΑΤΙΚΗ ΕΝΟΤΗΤΑ: Φυσική στην
εκπαίδευση
Τάξεις: Α΄ Β΄ Γ΄ ΛΥΚΕΙΟΥ
Μάθημα: Κινήσεις σε ευθεία και επίπεδο.
Γενική ενότητα: ΚΙΝΗΜΑΤΙΚΗ
Προβλεπόμενος χρόνος: Α΄ τάξη: 5 διδακτικές ώρες, Β΄ τάξη: 1 και Γ΄
τάξη: 1.
Εισαγωγή
Μέχρι
πριν 25 χρόνια προσπαθούσαμε με την κιμωλία και τον πίνακα να οικοδομήσουμε
έννοιες όπως η θέση (x), η μετατόπιση (dx), η στιγμή (t), η διάρκεια (dt), η ταχύτητα (v=dx/dt) και η επιτάχυνση (a=dv/dt).
Σήμερα διαθέτουμε ισχυρά
εργαλεία, όπως:
· τον καταγραφέα δεδομένων MultiLog του Σχολικού Εργαστηρίου Φυσικών Επιστημών που
δίνει απευθείας γραφικές παραστάσεις θέσης-χρόνου ενός κινητού.
· το λογισμικό Tracker που με μία απλή φωτογραφική μηχανή βιντεοσκοπούμε
την κίνηση και την αναλύει ο μαθητής όσες φορές θέλει.
· απλά ρομπότ (όπως το εκπαιδευτικό της Lego ή το Arduino), με τα οποία
είναι δυνατό να προσεγγίσουμε αυτές τις έννοιες και να τις συνδέσουμε με την
πραγματικότητα.
Περίληψη
Από το σχολικό
έτος 2013-14 επιχειρήσαμε τη μελέτη και τη διδασκαλία της ευθύγραμμης κίνησης στην
Α΄ λυκείου με τη χρήση του MultiLog και του εκπαιδευτικού ρομπότ.
Το επόμενο σχολικό έτος κατά τη
διδασκαλία της οριζόντιας βολής στο τμήμα προσανατολισμού της Β΄ λυκείου μελετήσαμε
ταυτόχρονα την ελεύθερη πτώση και την πλάγια βολή με τη βοήθεια ενός ακόμη
λογισμικού του Tracker (μετά από προτροπή του υπεύθυνου ΕΚΦΕ Ομόνοιας κ. Θ. Κρεμιώτη). 
Εφέτος στο τμήμα προσανατολισμού της Γ΄ λυκείου κατά τη διδασκαλία της φθίνουσας ταλάντωσης αξιοποιήσαμε το MultiLog, έναν ταλαντωτή και το λογισμικό GeoGebra.
Αποφθέγματα:
|
“Today’s scientists have substituted mathematics for experiments,
and they wander off through equation after equation, and eventually build a
structure which has no relation to reality.”
Nicola Tesla |
“The pedagogical value of an experiment is often inverse to the complexity of the experimental device.” James Clerk Maxwell |
Διδακτικοί στόχοι:
Οι μαθητές :
-
Να συνδέσουν
τις γραφικές παραστάσεις μετατόπισης – χρόνου με τις συγκεκριμένες ενέργειες
του κινητού.
-
Να αντλούν
πληροφορίες από το γράφημα για τη θέση του κινητού συναρτήσει του χρόνου και για την ταχύτητά του από την κλίση. Ειδικότερα:
o
Η μετατόπιση
είναι ανάλογη του χρόνου όταν η ταχύτητα είναι σταθερή.
o
Η μετατόπιση
είναι ανάλογη του τετραγώνου του χρόνου όταν η επιτάχυνση είναι σταθερή.
-
Να
κατασκευάζουν το γράφημα ταχύτητας – χρόνου από το γράφημα μετατόπισης – χρόνου και από αυτό:
o
Να
προσδιορίζουν την ταχύτητα κάθε στιγμή..
o
Να
υπολογίζουν τη μετατόπιση του κινητού από το εμβαδό.
o
Και την
επιτάχυνσή του από την κλίση.
-
Να πραγματοποιούν
δικά τους πειράματα, να τα επεξεργάζονται και να εξάγουν συμπεράσματα.
-
Να αποκρυπτογραφούν
ένα γράφημα, να διατυπώνουν τη σχετική συνάρτηση και να την επαληθεύουν με το αντίστοιχο
λογισμικό.
-
Να συνδέσουν
την σημαντικότητα της επιστήμης για την επίλυση πραγματικών προβλημάτων τους.
Α΄ λυκείου
Σύντομη περιγραφή της δραστηριότητας:
Στην Α΄ λυκείου η μελέτη της ευθύγραμμης ομαλής και ευθύγραμμα ομαλά
μεταβαλλόμενης κίνησης χωρίς αρχική ταχύτητα γίνεται με χρήση του καταγραφέα
δεδομένων MultiLog, του λογισμικού προγράμματος MultiLab και τη βοήθεια εκπαιδευτικού ρομπότ το οποίο είτε
οδηγείται τηλεκατευθυνόμενο μέσω ενός Tablet με Bluetooth, είτε προγραμματίζεται μέσα από το πρόγραμμα της Lego. Ο Logger έχει συνδεθεί στον
υπολογιστή στη σειριακή θύρα και ο αισθητήρας στην έξοδο 1 του καταγραφέα (πριν
ανοίξουμε το διακόπτη του Logger). Όταν το ρομπότ-όχημα κινείται ή σταματά, στον
υπολογιστή καταγράφονται οι μετρήσεις και φαίνεται η γραφική παράσταση
διαστήματος – χρόνου.
Υλικά, εξοπλισμός και λογισμικά που χρησιμοποιήθηκαν:
Ρομπότ-όχημα (στο πίσω
μέρος του ρομπότ έχει τοποθετηθεί επιφάνεια 20Χ15cm καλυμμένη με αλουμινόχαρτο
για να γίνεται εύκολα αντιληπτή η θέση του από τον αισθητήρα διαστήματος του MultiLog σε απόσταση από 40cm έως 5m), ένα βιντεοπροβολέα, τον ηλεκτρονικό υπολογιστή
του εργαστηρίου, τον καταγραφέα δεδομένων MultiLog, το λογισμικό MultiLab, ένα Tablet ή smart phone με Bluetooth.

·
Πρώτη διδακτική ώρα: εξοικείωση με το πειραματικό
περιβάλλον.
Συνδέουμε τον βιντεοπροβολέα, τον υπολογιστή, το MultiLog με το ραντάρ και
το ρυθμίζουμε να παίρνει μετρήσεις 1 ανά δευτερόλεπτο επί 50 δευτερόλεπτα,
εξηγώντας σε τι χρησιμεύει κάθε συσκευή.
Ενεργοποιούμε τον καταγραφέα και παρακολουθούμε
στην οθόνη την απεικόνιση των αποστάσεων των διάφορων αντικειμένων προσπαθώντας
να εξοικειωθούμε με τις αποστάσεις και το χρόνο.
Σταθεροποιούμε
το ραντάρ σε στασίδι στο πάτωμα, τοποθετούμε μπροστά ένα τηλεχειριζόμενο
αυτοκίνητο και παρακολουθούμε την καταγραφή της κίνησής του. Στην τάξη
χρησιμοποιήσαμε το NXT της Lego με ένα κινητήρα για ευθύγραμμες κινήσεις και ο τηλεχειρισμός γινόταν με
ένα Tablet ή smart phone μέσω Bluetooth. Μετά την
παρέλευση των 50 δευτερολέπτων, συζητούμε για το είδος της κίνησης του οχήματος
προσπαθώντας να εκμαιεύσουμε τις χρονικές διάρκειες που ήταν σταματημένο ή
κινείτο πιο γρήγορα ή πιο αργά. Επαναλαμβάνουμε μερικές φορές το πείραμα των 50
δευτερολέπτων και εκτυπώνουμε την πιο πετυχημένη από αυτές για επεξεργασία στο
σπίτι.
 |
·
Δεύτερη διδακτική ώρα: έλεγχος της ταχύτητας του
ρομπότ.
Το NXT
ελέγχει την ταχύτητα περιστροφής των κινητήρων του σε μια διαβάθμιση από 1 –
100 με προγραμματισμό ενός βήματος. Ευκαιρία λοιπόν να ελέγξουμε την ταχύτητα
που αναπτύσσει το όχημα που κατασκευάσαμε. Εκτελέσαμε 4 πειράματα με ταχύτητες
του κινητήρα 25%, 50%, 75% και 100%. Από τα γραφήματα εύκολα υπολογίσαμε την
ταχύτητα του οχήματος, όπως φαίνεται στην παρακάτω εικόνα.

·
Τρίτη διδακτική ώρα: εισαγωγή αρνητικής ταχύτητας.
Προγραμματίσαμε το NXT να προχωρήσει μπροστά με ταχύτητα 25% για 4s, να σταματήσει για 4s και να κινηθεί προς τα πίσω με ταχύτητα 50% για 2s. Έτσι από το γράφημα προέκυψε η ανάγκη της αρνητικής ταχύτητας, οπότε αρχίσαμε να κατασκευάζουμε γραφήματα ταχύτητας - χρόνου. Υπολογίσαμε το εμβαδό που περικλείεται ανάμεσα στο γράφημα της ταχύτητας, του άξονα του χρόνου και τις πλευρικές κάθετες. Αυτό το εμβαδό είχε μονάδες μήκους και μάλιστα ταυτιζόταν με τη μετατόπιση του οχήματος.

·
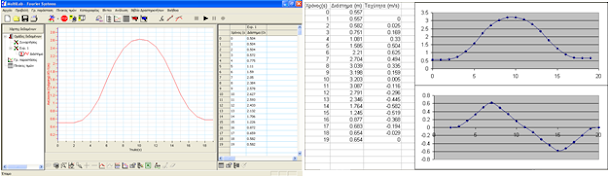
Τέταρτη διδακτική ώρα: ομαλά μεταβαλλόμενη κίνηση.
Προγραμματίσαμε το NXT να αυξάνει την ταχύτητά του από 0 – 100 κάθε
0,05s μέσω κύκλου επανάληψης. Τα αποτελέσματα στο πρώτο γράφημα.
Επαναλάβαμε το πείραμα μειώνοντας την ταχύτητα από
100 – 0 κάθε 0,05s, δεύτερο γράφημα και επεξεργαστήκαμε τις μετρήσεις .

·
Πέμπτη διδακτική ώρα: Σύνθετες κινήσεις.
Για πιο σύνθετες κινήσεις όπως η επιταχυνόμενη και επιβραδυνόμενη κίνηση
μπροστά και αντίστροφα, που προγραμμάτισαν να εκτελεί το ρομπότ. Πιο δύσκολο το
γράφημα. Τα αποτελέσματα είναι
ευκολότερα δεδομένου ότι το MultiLog συνεργάζεται με το Excel.
Β΄ λυκείου
Σύντομη περιγραφή της δραστηριότητας:
Κατά τη διδασκαλία της οριζόντιας βολής στη Β΄
λυκείου οι μαθητές βιντεοσκοπούν την ελεύθερη πτώση και πλάγια βολή, στη
συνέχεια μεταφέρουν την ταινία στο λογισμικό TRACKER, σημαδεύουν τα ίχνη της τροχιάς καρέ-καρέ, ενώ
παράλληλα παρακολουθούν να σχηματίζεται η γραφική παράσταση και ο αντίστοιχος πίνακας τιμών. Το TRACKER επιτρέπει την περαιτέρω ανάλυση των διαγραμμάτων x=f(t), v=f(t), a=f(t), y=f(x), κ.λπ.
Τέλος, η βιντεοσκόπηση βολών στο μπάσκετ και η
ανάλυσή τους με το tracker ενισχύει
το ενδιαφέρον των μαθητών στη χρήση του
λογισμικού.
Υλικά, εξοπλισμός και λογισμικά που
χρησιμοποιήθηκαν:
Μία απλή φωτογραφική
μηχανή, μία μπάλα του πινγκ-πονγκ, ένα ανακλινόμενο επίπεδο, ένας ηλεκτρονικός
υπολογιστής με το λογισμικό tracker, προαιρετικά ο βιντεοπροβολέας του εργαστηρίου.
·
Προεργασία στο σπίτι από τον μαθητή.
Οι μαθητές γνωρίζουν
από την Α΄ λυκείου την ελεύθερη πτώση. Έτσι τους καλούμε να «κατεβάσουν» στον υπολογιστή τους το λογισμικό
tracker από
τη διεύθυνση physlets.org/tracker να το εγκαταστήσουν και να πραγματοποιήσουν ένα
πείραμα ελεύθερης πτώσης ακολουθώντας τις εξής οδηγίες:
1. Βραχύχρονη βιντεοσκόπηση της ελεύθερης πτώσης ενός
σώματος (μπάλα κλπ.) δίπλα σε μετροταινία.
2. Φόρτωση του βίντεο στο tracker.
3. Ανίχνευση στιγμιότυπο αρχής – στιγμιότυπο τέλους από
το βίντεο.
4. Προσαρμογή του χάρακα του tracker στη μετροταινία του βίντεο.
5. Επιλογή «μάζας» από τα εργαλεία του προγράμματος.
6. Ιχνηλάτηση της μάζας στα καρέ του βίντεο.
7. Ανάλυση των γραφικών παραστάσεων.

Διδακτική διαδικασία διάρκειας μίας
ώρας.
Αφού διδάξουμε την οριζόντια βολή, επεκτείνουμε με μία
επιπλέον διδακτική ώρα στην πλάγια βολή, την οποία βιντεοσκοπούμε με τη βοήθεια
ανακλινόμενου επιπέδου και επαληθεύουμε τις εξισώσεις της με το tracker. Το σημαντικό
είναι ότι το βίντεο μπορεί να επαναληφθεί και να αναλυθεί εναλλάσσοντας τις
μεταβλητές (θέσης, ταχύτητας, επιτάχυνσης κάθε άξονα) συναρτήσει του χρόνου
όσες φορές χρειάζεται ο μαθητής, είτε μόνος είτε συνεργαζόμενος.

Γ΄ λυκείου
Σύντομη περιγραφή της δραστηριότητας:
Στην Γ΄ λυκείου η μελέτη της φθίνουσας ταλάντωσης γίνεται με χρήση του
καταγραφέα δεδομένων MultiLog, του λογισμικού προγράμματος MultiLab. Ο Logger έχει συνδεθεί στον υπολογιστή στη σειριακή θύρα
και ο αισθητήρας στην έξοδο 1 του καταγραφέα (πριν ανοίξουμε το διακόπτη του Logger), καταγράφονται οι
μετρήσεις και φαίνεται η γραφική παράσταση διαστήματος – χρόνου κατά την
φθίνουσα ταλάντωση ενός ταλαντωτή, ελατήριο μάζα με δίσκο, ώστε να το «βλέπει»
καλύτερα ο ανιχνευτής του Logger και να αυξήσουμε τις τριβές.
Υλικά, εξοπλισμός και λογισμικά που
χρησιμοποιήθηκαν:
Ένας ταλαντωτής (ελατήριο μάζα με δίσκο), ο ηλεκτρονικός υπολογιστής του
εργαστηρίου με το λογισμικό MultiLab, το MultiLog με τον αισθητήρα διαστήματος, ο βιντεοπροβολέας και το λογισμικό GeoGebra.
Ρυθμίσεις του MultiLog: 25 λήψεις το δευτερόλεπτο επί 80 δευτερόλεπτα
(2000 λήψεις).
Διδακτική διαδικασία μίας ώρας.
Κατά τη διδασκαλία της φθίνουσας ταλάντωσης οι μαθητές παρακολουθούν την κίνηση του ταλαντωτή, ενώ ταυτόχρονα αυτή αποτυπώνεται στην οθόνη του Η/Υ μέσω του αισθητήρα κίνησης του MultiLog. Στη συνέχεια εκτυπώνεται η γραφική παράσταση και καλούνται να βρουν τη συνάρτηση που την περιγράφει, μέσα από τα στοιχεία που προκύπτουν από το γράφημα του πειράματος σαν εργασία στο σπίτι.


Τελικά, εισάγουμε τη συνάρτηση στο λογισμικό GeoGebra και ελέγχουμε την ορθότητά της.

Συμπεράσματα:
Η μελέτη της
ευθύγραμμης κίνησης στο εργαστήριο με την αξιοποίηση των νέων τεχνολογιών, το
εκπαιδευτικό ρομπότ και τα λογισμικά MultiLab, Tracker και GeoGebra δίνουν
την ευκαιρία στους μαθητές να συνεργαστούν μεταξύ τους, να αναλάβουν δράση και
ρόλους, να έρθουν σε επαφή με τον προγραμματισμό, να αξιοποιήσουν τα κινητά
τους τηλέφωνα στη διαδικασία του πειράματος, να κάνουν μετρήσεις σε πραγματικό
χρόνο, να ανακαλύψουν την ουσιαστική σχέση που συνδέει τη θεωρία με το πείραμα,
έτσι:
– Τα γραφήματα απέκτησαν νόημα.
– Συνέδεσαν την αρνητική ταχύτητα με την κατεύθυνση
του οχήματος.
– Την έννοια της επιταχυνόμενης κίνησης με αρνητική
ταχύτητα ή/και της επιβραδυνόμενης κίνησης με θετική ταχύτητα.
– Ανέπτυξαν δεξιότητες στην κατασκευή του ρομποτικού
οχήματος.
– Δίδαξαν το ρομπότ να ενεργεί κατά τη θέλησή τους,
συνθέτοντας πρόγραμμα με απλές εντολές.
– Απέκτησαν νέες δεξιότητες κατά την επεξεργασία του
tracker.
– Ευνοήθηκε η
συνεργατικότητα των μαθητών.
Η ρομποτική είναι σήμερα ό,τι υπήρξε η πληροφορική πριν
τριάντα χρόνια, το παρελθόν και η εξέλιξη του τομέα της πληροφορικής, τόσο στο
δημόσιο βίο όσο και στην εκπαίδευση μας προϊδεάζει για το μέλλον. Ήδη η
ρομποτική χτυπάει την πόρτα του σύγχρονου πολίτη, δεν μπορεί η εκπαίδευση να
αγνοήσει τα σημεία των καιρών.
Βιβλιογραφία:
- Φυσική Γενικής Παιδείας (2014),
Α΄ Γενικού Λυκείου, ΙΤΥΕ
«ΔΙΟΦΑΝΤΟΣ»
- Φυσική Θετικής και Τεχνολογικής Κατεύθυνσης (2013), Β΄ Γενικού
Λυκείου, Ι ΤΥΕ «ΔΙΟΦΑΝΤΟΣ».
- Φυσική Θετικής και Τεχνολογικής Κατεύθυνσης (2013), Γ΄ Γενικού
Λυκείου, Ι ΤΥΕ «ΔΙΟΦΑΝΤΟΣ».
- Ματσαγγούρας, Η., (2000). Ομαδοσυνεργατική διδασκαλία και μάθηση.
Αθήνα: Γρηγόρης.

{kind=link}